{kind=link}
Swiss and German engineers have equipped the walking excavator with sensors and algorithms that allow it to dig trenches of a given shape autonomously. Experiments have shown that the accuracy of digging is about three centimetres.
Engineers are working on the automation of different stages of construction, including the preparation of a construction site and digging trenches. Potentially, automating the digging of trenches can increase the accuracy and speed of this process. However, this task is associated with several technological difficulties. For example, one of them is the difficulty of tracking the shape of the trench, because of the usual methods of creating a map of the surrounding space and determining the location on it poorly working in a highly changing environment.
A team of engineers led by Marco Hutter from Robotic Systems Laboratory, ETH Zurich, Zurich, Switzerland have created an autonomous excavator capable of effectively digging trenches of different shapes. They took the Menzi Muck M545 serial excavator as the basis. Engineers replaced all the hydraulic cylinders in the excavator with others, containing the force sensors and the degree of disclosure needed to track the interaction with the ground.
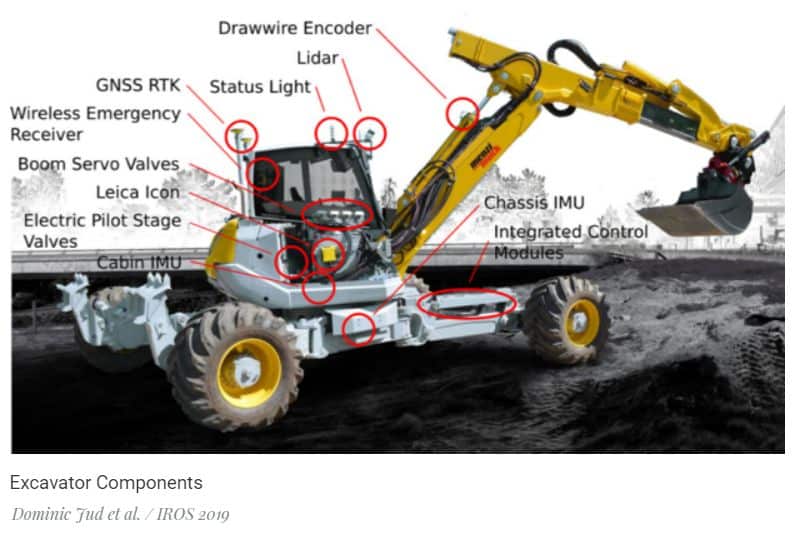
They also equipped the excavator with GPS sensors and RTK receivers to improve location accuracy, two lidars and inertial blocks. Thanks to them, the excavator can accurately track its position, as well as make a dynamic map of the ground in front of it.
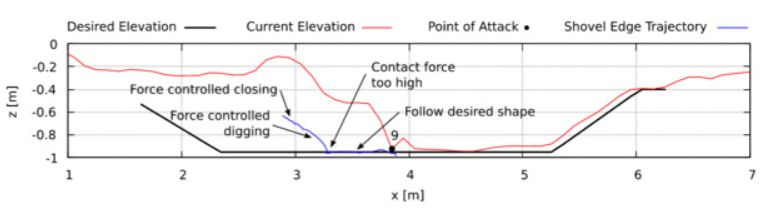
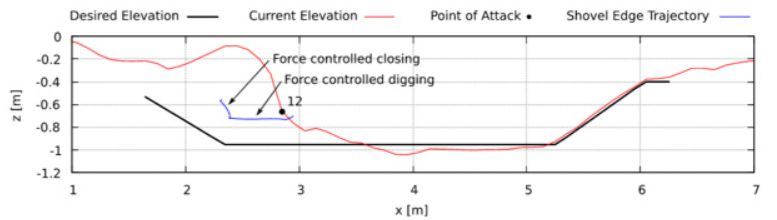
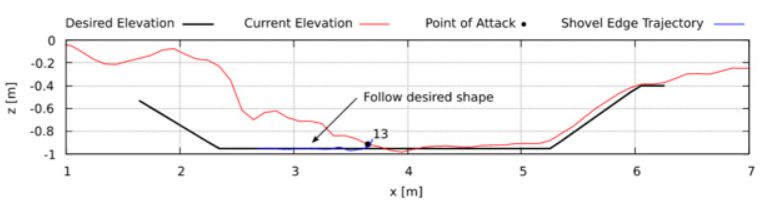
Another important component of the project is the algorithms that make up the environment model, as well as calculating the trajectory of the bucket. The second group of algorithms is particularly difficult to implement, because when digging part of the ground after lifting the bucket inevitably falls down, and this should be taken into account in the calculations.
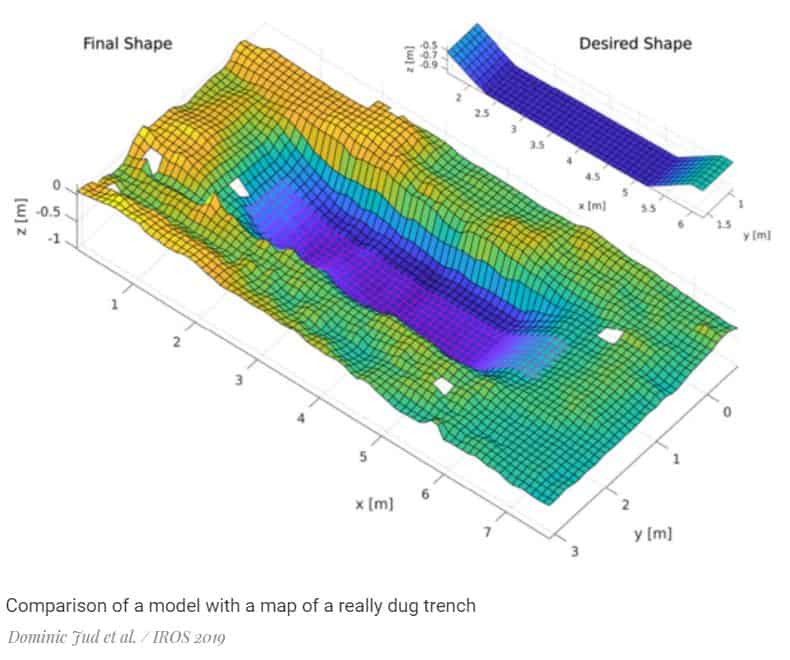
Having equipped the excavator with the necessary equipment and algorithms, the developers checked its work, instructing to dig a trench with a trapezoidal profile. After finishing the work, the engineers compared the 3D map of the dug trench with the model and found that the average deviation from the model was 2.7 ± 3.5 centimetres with a trench length of several meters, which exceeds the accuracy received by other developers.