
{kind=link}
A team of Japanese engineers created a four-legged robot that can walk on horizontal surfaces and climb absolutely vertical stairs, and it independently recognizes the stair handrails in front of it.
Walking robots have become popular among researchers due to their ability to overcome obstacles on the ground, as well as the fact that their elements and algorithms have been strongly developed in recent years. However, such robots are usually unable to cope with high obstacles, although there are exceptions, for example, Atlas and Spot from Boston Dynamics or E2-DR from Honda. But even they can climb only on inclined stairs, and not vertical. This is due to the fact that when the robot climbs a vertical ladder, its centre of gravity tilts too hard backwards, and it cannot be held without hooks or other holding mechanisms.
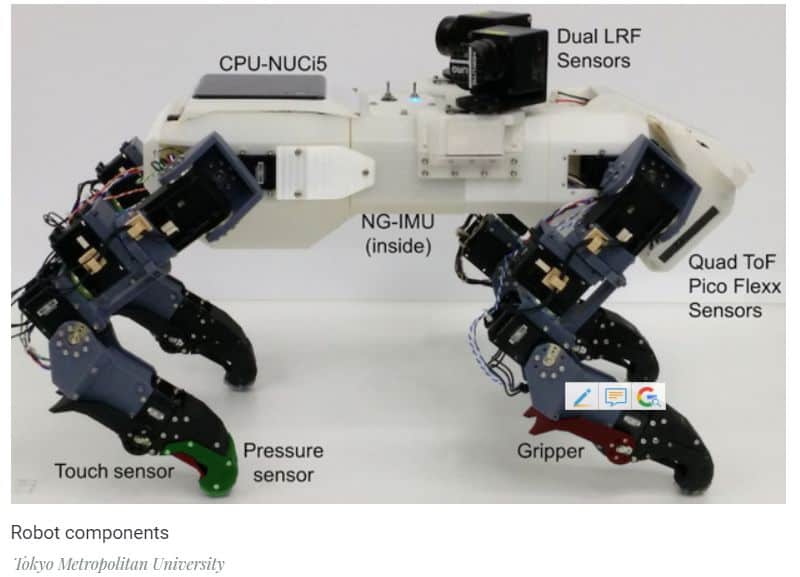
Naoyuki Kubota from Tokyo Metropolitan University and his colleagues equipped the four-legged robot with simple grips that do not interfere with his walking but allow him to climb up the vertical stairs and continue the way up. The robot has a rather complex foot design with five degrees of freedom in each. At the end of the leg are force and touch sensors, as well as a latch that allows you to grab the handrail on the stairs.
For navigation, the robot has two laser rangefinders on its back and four time-of-flight cameras on its head. Both types of sensors directly measure the distance by sending rays and measuring the time after which the reflected rays return to them. Data from different sensors are combined into a single point cloud, and machine learning algorithms independently recognize the stair handrails and calculate the optimal capture points.
It is worth noting that the algorithms of the robot are not universal and they need to be trained separately for each ladder, but in the future, the authors plan to correct this drawback. In addition, the video shows that the recording has been accelerated many times, and in fact, the robot moves extremely slowly.