
{kind=link}
U.S. engineers said in the paper, which will be presented at the IROS 2019 conference, that they taught jumping Robo-cubes to recognize each other and communicate with each other. Thanks to this, the Robo-cubes have learned how to independently line up, move around each other in a given direction, and also move towards the light.
In robotics, there is a direction in which researchers create robots and algorithms for collective interaction. Typically, such swarms of robots consist of many identical devices with equal status, using a decentralized algorithm for self-organization. For example, kilobots are popular among researchers – simple robots that communicate with each other using infrared signals and move through vibration. On them, researchers worked out algorithms for independent collective decision-making in a group, as well as an algorithm for artificial morphogenesis.
In 2013, American researchers led by Daniela Rus of the Massachusetts Institute of Technology introduced the M-Blocks robot, a cube that can move without the use of external actuators. Instead, the robot uses a flywheel that spins to the desired speed, after which it is clamped by a brake belt. Because of this, the torque is transferred to the robot body and it rotates in the right direction or even jumps. The robot can change the direction of movement by turning the flywheel before unwinding it. Between themselves, robots are connected using magnets.
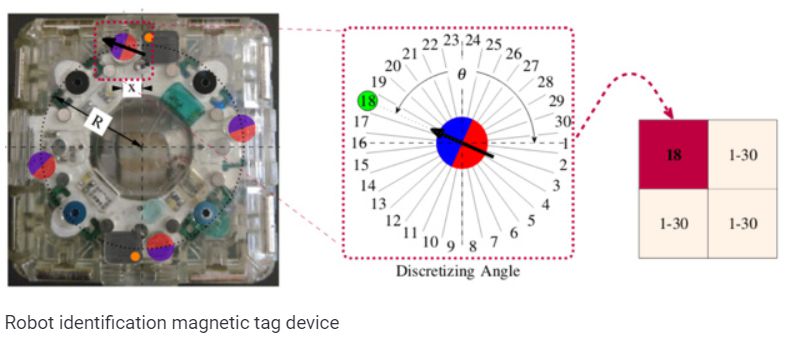
In this new study, engineers equipped the robot with a simple identification system. Four small magnets are installed on each face of the robot. Their poles are oriented in a certain way so that each magnet is rotated in one of 30 possible positions. There are also two magnetic field sensors on each face. In future versions, the authors plan to use four sensors – one for each magnet. This scheme allows the robot to identify its neighbours. In addition to magnetic tags and sensors, each robot has several LEDs and optical sensors, as well as a Wi-Fi module with which they can receive data from the server.
Engineers showed three examples of semi-autonomous collective interaction. In the first mode, passive and active robots are used. Passive ones are set in the form of a strip or plane, while active ones move along them. The server assigns each passive robot a virtual arrow indicating the direction of movement and transfers this data to the active. Active robots move along passive ones, focusing on virtual arrows.
In the second example, robots line up. First, the server assigns one robot the status of a central one, and then the others begin to line up using a simple algorithm in which they move, focusing on the number of surrounding neighbours and their commands transmitted via LEDs (“keep moving” or “attach here”).
In the third example, light sensors in robots are used for collective movement towards the light. The server selects the central module, after which the rest begin to move to the light source, connect with each other and form a single structure next to it.
Another group of engineers led by Daniela Rus also used rotational mechanisms to create a jumping Robo-cube. However, in their development, two electric motors are used, rotating a metal tongue, which repels the robot from the floor.
And engineers from the University of Pennsylvania have been working on modular robots for several years, the design of which also resembles a cube. They move the wheels located on the sides and are able to attach to each other using electromagnetic coupling. Besides the fact that they are able to form a single structure of several modules.