
{kind=link}
American engineers have developed a robot, in which the actuators and batteries are implemented as a single system. Inside the robot, there are tubes and chambers filled with liquid, which simultaneously acts as the electrolyte of the flow accumulator and the working fluid of the hydraulic actuators responsible for the movement of the fins.
Usually, engineers use robots and other machines as sources of motion for electric motors. Some are trying to reproduce the mechanisms found in animals. For example, in the field of engineering sciences and materials science there is a rather broad direction, which is engaged in the creation of artificial muscles that can contract or expand under the action of electric current, light, heat or pressure. However, muscles are not the only movement mechanism used by animals. For example, some spiders use hydraulic drives – they straighten limbs, increasing the pressure of hemolymph in them.
A new shape memory alloy has been created that surpassed titanium nickelide
Robert Shepherd (Robert Shepherd) and his colleagues from Cornell University and the University of Pennsylvania used hydraulic drives in their robot fish, but they used a rather interesting design, thanks to which they managed to get rid of a separate battery. Engineers used a flow-through battery circuit in which the electrolyte is circulated through a system of tubes and fed to an area with electrodes divided into two parts by an ion-exchange membrane. This robot has two such batteries. In front of the robot there are two pumps for pumping electrolyte – one for each battery. One of the accumulators is associated with cavities in the dorsal and pectoral fins, and the second with cavities in the caudal fin.
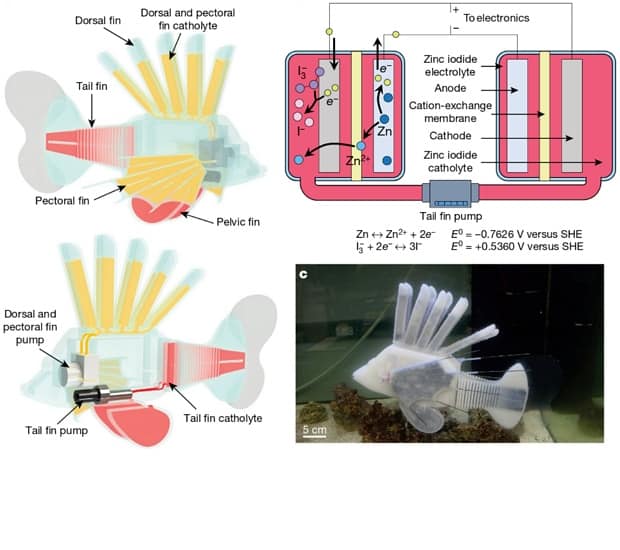
Pumps in this design perform two functions at once. First, they provide a uniform concentration of ions near the electrodes due to the movement of the liquid. Secondly, they allow the robot to move fins. Experiments have shown that thanks to the movements of the tail fin, the robot can swim at a speed of 1.56 body lengths per minute. In addition, the robot can move the pectoral fins.
Robots with “artificial blood” to mimic the human circulatory system
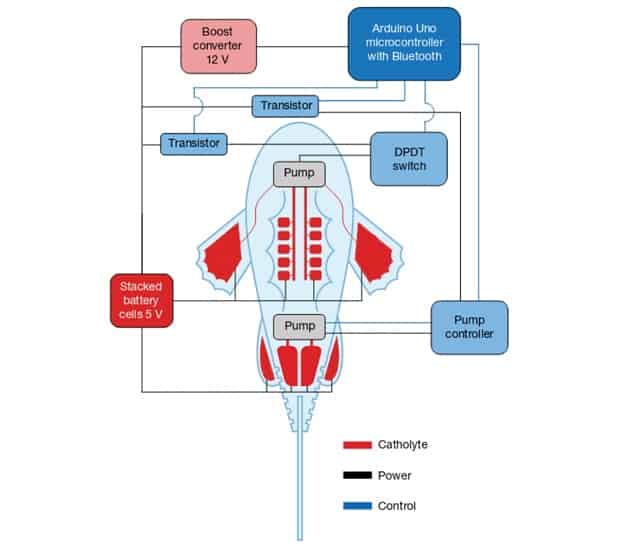
The Arduino Uno board is responsible for controlling the robot. It is worth noting that to power the pumps, engineers installed separate batteries and a voltage converter up to 12 volts in the robot. The authors’ calculations show that the maximum theoretical energy density of a zinc iodide solution is 332 watt-hours per liter, which, for example, is half the equivalent of a lithium-ion battery of an electric vehicle Tesla Model S. Based on this, engineers have calculated that the robot can swim, constantly moving its fins, for 36.7 hours.
Last year, scientists from the United States and Saudi Arabia used the design of a flow-through battery to create a hybrid device for the accumulation of solar energy. It consists of several layers, between which redox reactions take place, and their course depends on which electrodes (from the battery or the solar panel) are used at the time. The average efficiency of converting solar energy into electrical energy given off by the flow-through battery over ten cycles turned out to be 14.1 percent.
Via | Nature