
{kind=link}
American engineers created a miniature flying robot weighing 0.66 milligrams, capable of making a long controlled flight. It is equipped with four pairs of wings, driven by actuators, which contract under the influence of an electric field, which sets the wings in motion.
Over the past years, various groups of engineers have been developing microrobots, usually having a mass of less than a gram. At the current level of technological development, this is technically an extremely difficult task, because in a device of such mass and size it is necessary to combine a motor mechanism, a control board, a power source or an external energy reception system. Last year, DARPA announced a separate competition among engineers to develop the necessary components.
If engineers undertake the development of a flying microrobot, this task becomes even more difficult, because there is a limitation on the mass, as well as the need for more fast and easy actuators. Working prototypes of Robo-bees weighing several hundred milligrams already exist, and in recent developments, their capabilities have grown significantly. For example, two teams of engineers from Harvard and the University of Washington recently introduced solar-powered flying robots as well as robots receiving energy through a wire capable of making a controlled flight.
All of these robots use piezoelectric actuators, which are quite comfortable due to their low size and mass but have limited resistance to impacts. And it is important, given that so far such robots fly quite unstable. Now engineers led by Robert Wood of Harvard University have shown a Robo-bee that uses soft dielectric actuators.
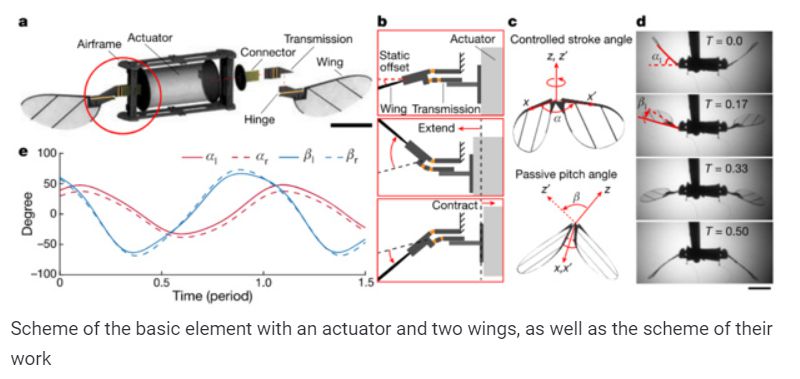
Engineers created a basic element consisting of one cylindrical actuator and two wings in the ends. They are fixed simultaneously to the actuator and to the frame, so when the actuator is reduced, the wings move in one direction, and when expanding – in the other. Actuators consist of a dielectric elastomer, which changes its shape under the influence of an electric field. During the experiments, the actuator worked at a voltage of 800 to 1400 volts.
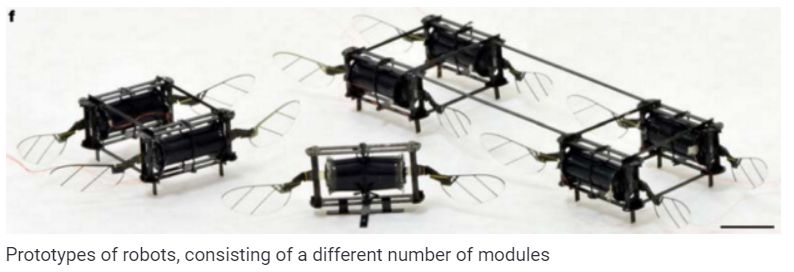
From such basic elements with two wings engineers assembled several prototypes, which had two to eight wings. The largest of them has eight wings and a mass of 660 milligrams. Its main feature is that such a number of independently controlled elements allows the robot to maintain its position and rotate.
The researchers experimentally showed that the Robo-bees they created can collide with walls or other robots without damaging wings and other elements. They are also able to detect collisions at an early stage by tracking the actuator’s performance parameters.
There are impressive projects and walking microrobots. Last year, for example, Rolls-Royce unveiled a microrobot project to diagnose and repair aircraft engines from the inside. Six months later, American engineers with the company’s support showed a working prototype of a microrobot, which managed to walk in an aircraft engine in an upside-down position.