
{kind=link}
American engineers have developed a sloth robot capable of climbing cables and moving from one cable to another. Due to the relatively low energy consumption and the use of solar panels of such a robot, it is possible to use it almost unlimitedly for observing trees in the forest, the authors of an article presented at the ICRA 2019 conference say.
macOS Catalina will use zsh instead of bash as the default shell
The creation of robots capable of climbing cables is an important technological task, developments from which are potentially applicable in many areas. For example, in 2016, Russia created a robot to test high-voltage power lines. The drone lowers such a robot onto a ground wire, after which it moves independently along the main wires and inspects them. In addition, potentially these robots can be used for research in dense forests in which the branches of neighboring trees are in contact.
Mozilla brings Firefox password management as a browser addon
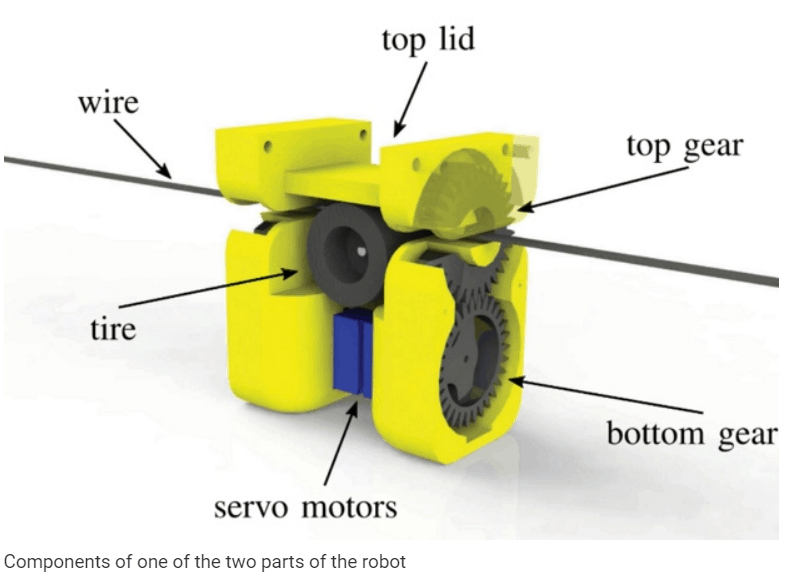
Engineers from the Georgia Institute of Technology under the leadership of Magnus Egerstedt (Magnus Egerstedt) were inspired by the sloths and decided to create an energy efficient robot, on the basis of which one could create a robot capable of climbing branches. The robot consists of two parts and moves due to the wheel in each part in contact with the cable.
Tesla Pickup: this is all we know about Elon Musk’s next electric car
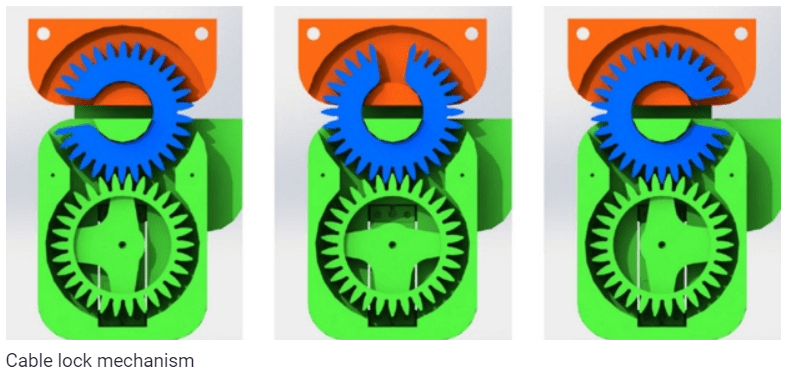
In addition, in each part of the robot there are two full-fledged gears and two associated with them, but with a cut sector. Inside such gear a cable is threaded. When moving forward gear is located so that the cable could not go beyond it. If the robot needs to move to an adjacent cable, the gear rotates so that the cut-out is horizontal. Another engine in the loop connecting the two parts helps the robot to move between adjacent cables.
At WWDC 2019, Apple introduces iPadOS, iOS 13 and new Mac Pro
To power the robot uses a battery with a capacity of 1000 milliamp-hours, as well as two solar panels located on the sides of one of the parts. The developers note that due to the use of wheels for moving along cables, as well as a passive holding mechanism, the robot has greater energy efficiency than other robots designed to move along cables.
In addition to creating a hardware platform, engineers also wrote software for the robot, allowing it to pave the way for the ropes itself. The user can specify the point to be monitored, after which the robot, having a cable system map, will independently calculate the path to the observational position closest to the given point.
BitTorrent clients: the 17 best applications to download torrents
Previously, engineers from the Georgia Institute of Technology created another sloth robot to work on a cable. It also consists of two parts, but has a completely different design and principle of operation. He is able to hook the end of one part of the cable and swing the other, then to cling to it. After that, he can let go of the first part and start swaying again in order to move on.
Physicists caught and reversed the quantum leap